Modelization of the normal and pathological gait
Investigators: Romain Van Hulle (LAMH-Aérospatiale et Mécanique), O. Brüls (LAMH-Aérospatiale et Mécanique)
If biomechanical models have been widely used in order to evaluate joint torques and muscle efforts in an inverse dynamics approach, they are not yet ready for predictive simulations. This means that they cannot be exploited to predict gait pattern modifications when certain parameters are changed (e.g., the performance of a muscle group after a specific training, a joint mobility after some physiotherapy, the replacement of a hip or knee prosthesis, or a neurological drug treatment). The objective of this PhD thesis is to develop predictive modeling tools for gait motion. For that purpose, we will need to model not only the biomechanics of the musculo-skeletal system but also the neurofeedback, which is necessary to simulate a stable gait.
Experimental study about the effects of human excitation of flexible structures
Investigators: V. Denoël (LAMH-ArGEnCo), C. Schwartz (LAMH)
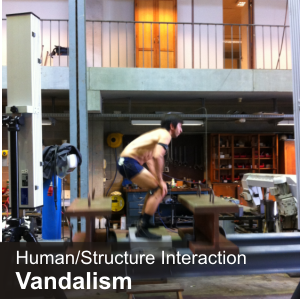 Loads applied on structures have been the focus of researches for many years. Recent advances have shown there is still a lot to do within that area. Among others, deliberate loading on flexible structures or synchronization of human actions as pedestrians, have raised major issues in civil structures that are not yet properly understood nor modeled. The Human Motion Analysis Lab is nested in the perfect environment to tackle this kind of problems: it is hosted in a structural engineering lab and managed by a multi-disciplinary board whose expertise spans domains as various as physiotherapy, mechatronics, inverse dynamic modeling. It is further equipped with various measurement means as active 3D markers, platform, 2D video that allow to work both in a sterilized experimental environment, or outdoor, closer to real-loading conditions.
Loads applied on structures have been the focus of researches for many years. Recent advances have shown there is still a lot to do within that area. Among others, deliberate loading on flexible structures or synchronization of human actions as pedestrians, have raised major issues in civil structures that are not yet properly understood nor modeled. The Human Motion Analysis Lab is nested in the perfect environment to tackle this kind of problems: it is hosted in a structural engineering lab and managed by a multi-disciplinary board whose expertise spans domains as various as physiotherapy, mechatronics, inverse dynamic modeling. It is further equipped with various measurement means as active 3D markers, platform, 2D video that allow to work both in a sterilized experimental environment, or outdoor, closer to real-loading conditions.
Improving 3D measurements accuracy with camera information redundancy
Investigators: C. Schwartz (LAMH), O. Brüls (LAMH-Aérospatiale et Mécanique), V. Denoël (LAMH-ArGEnCo)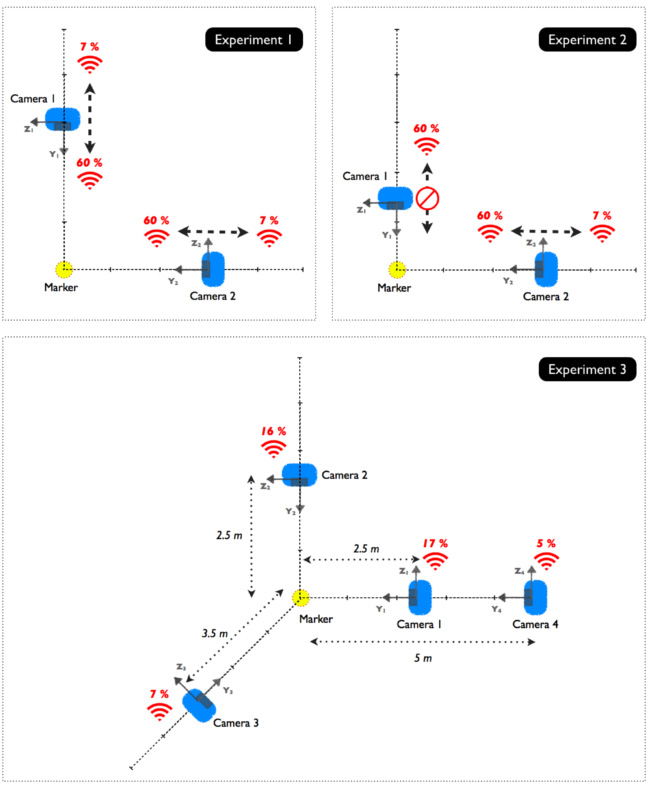
The accuracy of 3D systems depends on several factors such as the signal level of the sensors, the position of the marker in the field of view and the resolution of the system at the marker localization. When using several units to cover a large field of view, the marker position might be over-determined. We propose to take different factors level in to account during the merging process to improve overall accuracy.